Resumen en español al final del artículo
Since Personal Computers have discontinued to include parallel ports plenty of projects have appeared to help to connect bits with atoms. Recently, Arduino appears to be in fact a free hardware project. But according to the rules of the Free Software Foundation (FSF) a program is free (free as in freedom) if anyone can copy it and can distribute modified versions of it (among other rules).
The problem arises when you deal with atoms. Copying bits is pretty simple, but to produce a printed circuit of two or more layers as is common in Arduino-derived projects you need special equipment that is far beyond the reach of the target population in educational environments. Most of the users are children and teachers who don't have access to the technology necessary to build multi layer circuits, and in most of the communities that they live in, access to that kind of technology is not an option or in the best-case scenario it is a very expensive one.
Since 2003 the MINA research group of the Facultad de Ingeniería, Universidad de la República, Uruguay has been working on projects related to input/output (IO) boards and microcontrollers. When we deployed the first version of the Butiá robot in 27 public schools of Uruguay we used an Arduino Mega board and a custom design for an Arduino shield to work with the sensors and motors of the Butiá kit.
It wasn't long before we received an e-mail asking how to make the robot. However, getting access to that kind of technology was hard for a standard school teacher that did not have economical resources and the possibility of importing electronic components.
As a way of finding a solution for technology access the idea of self construction of the IO board and sensors was set as an objective of the next version of the robot. Previous work had been done by the group with the USB4all board, so that project was taken as a starting point.
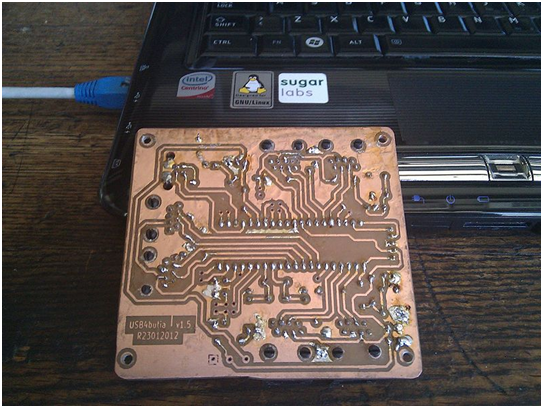
Handmade USB4butia board
We designed the new IO board with the objective that the reproduction of the board was simple enough that anyone can do it without the need of expensive equipment and using components available in the electronic local market of Uruguay, since in many developing countries is very hard to find the state of the art in electronics. But also we wanted to maintain some good design ideas and features that we previously had, like sensors Hot Plug and Plug and Play capabilities which enables kids not to worry of nonsense details that makes the programming more difficult like specifying every time that a sensor is used in which port is connected.
The printed circuit of the USB4butia board has only one layer, which makes it easy to print and transfer using simple elements that are available for everyone like an ordinary clothes iron. Our goal was to make a design of an IO board which can be built by hand as can be seen in the photo above, enabling the experience of building for those who are interested in hardware; enforcing the idea of being full developers of the platform and not only users.
In that sense we consider that projects that take into account who will be the end user and the technological environment where he and his community live, giving the tools to reproduce the hardware and modify it, faithfully reflects the original spirit of the FSF free concept. It doesn't make sense as a free hardware project if the user can't access to the tools that are necessary to reproduce the components.
We are also promoting alternative ways to build all the robot components based on the hardware re-utilization (recycling of old computer components). We consider that the technology appropriation experience of building your own robot is very meaningful and empowers the learning process and the USB4butia is an important component in the robot fabrication.
An example of free technology appropriation is the school of Villa del Carmen, a small town of Uruguay with a population of about 2.600 habitants where they modified the original design of the butiá robot to reuse an old computer case and made their USB4butia board reusing components of old computers, domestic routers and others devices. Also they documented all the experience to share with others showing that there's no need to import technology to access to robots or physics labs equipment.

ViPa robot, a robot based on Butiá platform using USB4butia board
Written by Andrés Aguirre who is an Assistant Professor at Universidad de la República - Uruguay and a member of the butía project.
Resumen en español: En este artículo escrito por Andrés Aguirre del proyecto Butiá se documenta el desarrollo de USB4butia. La cual es una placa de entrada/salida verdaderamente libre y fácil de producir con pocos recursos.